
Implementation of Adaptive Embedded Controller for a Temperature Process
Keywords:
embedded, control, MATLAB, Simulink, MRACAbstract
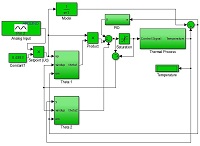
The paper proposed and carried out an adaptive embedded control strategy with the help of Arduino open hardware platform. The proposed control strategy is to carry out a cost-effective interface between the simulation software and a real-time process. The data acquisition and control is done with the help of Arduino Uno which has been interfaced with MATLAB Simulink The control algorithms developed in Simulink model can be downloaded into the Arduino Uno, working as a standalone controller. In this paper, various control algorithms are used to control the temperature process, including embedded Modified Model Reference Adaptive Control (MMRAC). Its performance is compared to other control algorithms. The result shows that the MMRAC scheme improves the transient performance of the temperature control system.
Published
How to Cite
Issue
Section
License
Submission of a manuscript implies: that the work described has not been published before that it is not under consideration for publication elsewhere; that if and when the manuscript is accepted for publication. Authors can retain copyright in their articles with no restrictions. is accepted for publication. Authors can retain copyright of their article with no restrictions.

Since Jan. 01, 2019, AITI will publish new articles with Creative Commons Attribution Non-Commercial License, under The Creative Commons Attribution Non-Commercial 4.0 International (CC BY-NC 4.0) License.
The Creative Commons Attribution Non-Commercial (CC-BY-NC) License permits use, distribution and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes.


