
Simulation Study on a New Hybrid Autonomous Underwater Vehicle with Elevators
DOI:
https://doi.org/10.46604/peti.2023.12343Keywords:
HTAUV, hydrodynamic parameters, elevator, CFD simulationAbstract
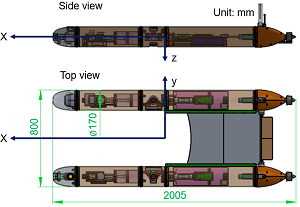
This study aims to design a new hybrid twin autonomous underwater vehicle (HTAUV) consisting of dual cylinder hulls and analyze its pitching motion. The kinematic model for the HTAUV is established, followed by the execution of hydrodynamic simulation CFD of the HTAUV using Ansys Fluent. These simulations are conducted to obtain the hydrodynamic force equation of the HTAUV, which relates to the deflection angle of the elevator. Through the motion simulation of the HTAUV, under the same net buoyancy condition, notable differences emerge when the elevator is deflected. Specifically, parameters such as gliding speed, gliding angle, and pitch angle of the HTAUV are larger when the elevator is deflected, as compared to cases where no deflection is applied.
References
P. V. Patil, M. K. Khan, M. Korulla, V. Nagarajan, and O. P. Sha, “Design Optimization of an AUV for Performing Depth Control Maneuver,” Ocean Engineering, vol. 266, part 5, article no. 112929, December 2022.
A. Hammoud, J. Sahili, M. Madi, and E. Maalouf, “Design and Dynamic Modeling of ROVs: Estimating the Damping and Added Mass Parameters,” Ocean Engineering, vol. 239, article no. 109818, November 2021
C. Cheng, Q. Sha, B. He, and G. Li, “Path Planning and Obstacle Avoidance for AUV: A Review,” Ocean Engineering, vol. 235, article no. 109355, September 2021.
H. Wu, W. Niu, S. Wang, and S. Yan, “An Optimization Method for Control Parameters of Underwater Gliders considering Energy Consumption and Motion Accuracy,” Applied Mathematical Modelling, vol. 90, pp. 1099-1119, February 2021
M. Q. He, C. D. Williams, P. Crocker, D. Shea, N. Riggs, and R. Bachmayer, “A Simulator Developed for a Twin-Pod AUV, the Marport SQX-500,” Journal of Hydrodynamics, Ser. B, vol. 22, no. 5, supplement 1, pp. 184-189, October 2010.
P. J. B. Sánchez, M. Papaelias, and F. P. G. Márquez, “Autonomous Underwater Vehicles: Instrumentation and Measurements,” IEEE Instrumentation & Measurement Magazine, vol. 23, no. 2, pp. 105-114, April 2020.
D. Li and L. Du, “AUV Trajectory Tracking Models and Control Strategies: A Review,” Journal of Marine Science and Engineering, vol. 9, no. 9, article no. 1020, September 2021.
C. G. D. Bono and L. G. Buttaro, “Drag Based Shape Optimization of Submarines and AUVs Using CFD Analysis,” unpublished.
J. Huang, H. S. Choi, M. T. Vu, D. W. Jung, K. B. Choo, H. J. Cho, et al., “Study on Position and Shape Effect of the Wings on Motion of Underwater Gliders,” Journal of Marine Science and Engineering, vol. 10, no. 7, article no. 891, July 2022.
K. Stryczniewicz and P. Drężek, “CFD Approach to Modelling Hydrodynamic Characteristics of Underwater Glider,” Transactions on Aerospace Research, vol. 4, no. 257, pp. 32-45, 2019.
T. L. Le, T. H. Vuong, and T. N. Tran, “A Computational Fluid Dynamics Study on the Design Optimization of an Autonomous Underwater Vehicle,” VNUHCM Journal of Science and Technology Development, vol. 24, no. 2, pp. 1962-1966, May 2021.
T. L. Le and D. T. Hong, “Computational Fluid Dynamics Study of the Hydrodynamic Characteristics of a Torpedo-Shaped Underwater Glider,” Fluids, vol. 6, no. 7, article no. 252, July 2021.
N. D. Nguyen, H. S. Choi, H. S. Jin, J. Huang, and J. H. Lee, “Robust Adaptive Depth Control of Hybrid Underwater Glider in Vertical Plane,” Advances in Technology Innovation, vol. 5, no. 3, pp. 135-146, July 2020.
T. Q. M. Nhat, H. S. Choi, M. T. Vu, J. Sur, J. I. Kang, and H. J. Son, “On the Position Determination of Docking Station for AUVs Using Optical Sensor and Neural Network,” International Journal of Engineering and Technology Innovation, vol. 10, no. 1, pp. 15-24, January 2020.
J. Huang, H. S. Choi, D. W. Jung, J. H. Lee, M. J. Kim, K. B. Choo, et al., “Design and Motion Simulation of an Underwater Glider in the Vertical Plane,” Applied Sciences, vol. 11, no. 17, article no. 8212, September 2021.
J. G. Graver, “Underwater Gliders: Dynamics, Control and Design,” Ph.D. dissertation, Department of Mechanical and Aerospace Engineering, Princeton University, Princeton, NJ, 2005.
J. Huang, H. S. Choi, D. W. Jung, K. B. Choo, H. Cho, P. H. N. Anh, et al., “Analysis of a New Twin Hybrid Autonomous Underwater Vehicle,” Applied Sciences, vol. 13, no. 3, article no. 1551, February 2023.
Y. Singh, S. K. Bhattacharyya, and V. G. Idichandy, “CFD Approach to Steady State Analysis of an Underwater Glider,” 2014 Oceans - St. John’s, pp. 1-5, September 2014.
Published
How to Cite
Issue
Section
License
Copyright (c) 2023 Jiafeng Huang, Hyeung-Sik Choi, Dong-Wook Jung, Hyunjoon Cho, Phan Huy Nam Anh, Ruochen Zhang, Jung-Hyeun Park, Chi-Ung Yun

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
Submission of a manuscript implies: that the work described has not been published before that it is not under consideration for publication elsewhere; that if and when the manuscript is accepted for publication. Authors can retain copyright of their article with no restrictions. Also, author can post the final, peer-reviewed manuscript version (postprint) to any repository or website.

Since Oct. 01, 2015, PETI will publish new articles with Creative Commons Attribution Non-Commercial License, under The Creative Commons Attribution Non-Commercial 4.0 International (CC BY-NC 4.0) License.
The Creative Commons Attribution Non-Commercial (CC-BY-NC) License permits use, distribution and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes






