
Application of Image Processing Techniques for Autonomous Cars
DOI:
https://doi.org/10.46604/peti.2021.6074Keywords:
image processing, autonomous cars, self-driving, object detectionAbstract
This paper aims to implement different image processing techniques that will help to control an autonomous car. A multistage pre-processing technique is used to detect the lanes, street signs, and obstacles accurately. The images captured from the autonomous car are processed by the proposed system which is used to control the autonomous vehicle. Canny edge detection was applied to the captured image for detecting the edges, Also, Hough transform was used to detect and mark the lanes immediately to the left and right of the car. This work attempts to highlight the importance of autonomous cars which drastically increase road safety and improve the efficiency of driving compared to human drivers. The performance of the proposed system is observed by the implementation of the autonomous car that is able to detect and classify the stop signs and other vehicles.
References
V. Viswanathan and R. Hussein, “Applications of Image Processing and Real-Time Embedded Systems in Autonomous Cars: A Short Review,” International Journal of Image Processing, vol. 11, no. 2, pp. 35-49, April 2017.
J. V. Brummelen, M. O’Brien, D. Gruyer, and H. Najjaran, “Autonomous Vehicle Perception: The Technology of Today and Tomorrow,” Transportation Research Part C: Emerging Technologies, vol. 89, pp 384-406, April 2018.
J. Joel, G. Fatma, B. Aseem, and G. Andreas, “Computer Vision for Autonomous Vehicles: Problems, Datasets and State of the Art,” Foundations and Trends® in Computer Graphics and Vision, vol. 12, no. 1-3, pp. 1-308, July 2020.
Y. Xing, C. Lv, L. Chen, H. Wang, H. Wang, D. Cao, et al., “Advances in Vision-Based Lane Detection: Algorithms, Integration, Assessment, and Perspectives on ACP-Based Parallel Vision,” IEEE/CAA Journal of Automatica Sinica, vol. 5, no. 3, pp. 645-661, May 2018.
A. Jain, H. Reddy, and S. Dubey, “Automated Driving Vehicle Using Image Processing,” International Journal of Computer Science and Engine and Engineering, vol. 2, no. 4, pp. 138-140, May 2014.
R. Muthalagu, A. Bolimera, and V. Kalaichelvi, “Lane Detection Technique Based on Perspective Transformation and Histogram Analysis for Self-Driving Cars,” Computers & Electrical Engineering, vol. 85, 106653, July 2020.
X. Li, Q. Wu, Y. Kou, L. Hou, and H. Yang, “Lane Detection Based on Spiking Neural Network and Hough Transform,” 8th International Congress on Image and Signal Processing (CISP), October 2015.
Y. Huang, Y. Li, X. Hu, and W. Ci, “Lane Detection Based on Inverse Perspective Transformation and Kalman Filter,” KSII Transactions on Internet and Information Systems, vol. 12, no. 2, pp. 643-661, February 2018.
J. M. Yang and S. H. Wei, “Spatial and Spectral Nonparametric Linear Feature Extraction Method for Hyperspectral Image Classification,” Advances in Technology Innovation, vol. 2, no. 3, pp. 68-72, July 2017.
Q. Wang, J. Gao, and X. Li, “Weakly Supervised Adversarial Domain Adaptation for Semantic Segmentation in Urban Scenes,” IEEE Transactions on Image Processing, vol. 28, no. 9, pp. 4376-4386, September 2019.
Q. Wang, J. Gao, and Y. Yuan, “Embedding Structured Contour and Location Prior in Siamesed Fully Convolutional Networks for Road Detection,” IEEE Transactions on Intelligent Transportation Systems, vol. 19, no. 1, pp. 230-241, January 2018.
W. Suh, J. R. Kim, and J. Cho, “Vision Technology Based Traffic Safety Analysis Using Signal Data,” Proceedings of Engineering and Technology Innovation, vol. 13, pp. 20-25, July 2019.
W. H. Suh, J. W. Park, and J. R. Kim, “Traffic Safety Evaluation Based on Vision and Signal Timing Data,” Proceedings of Engineering and Technology Innovation, vol. 7, pp. 37-40, December 2017.
Injury Facts, “Historical Fatality Trends,” https://injuryfacts.nsc.org/motor-vehicle/historical-fatality-trends/deaths-and-rates/, October 23, 2018.
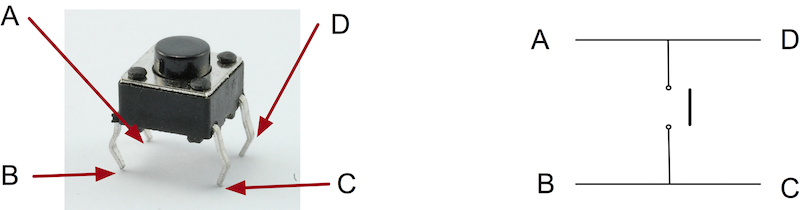
J. Wan, “Working of a 4-pin Push Button,” http://www.jobiwan.net/XFP/button.png, December 10, 2018.
T. Emara, “Pinhole Camera Distance Measurement,” http://emaraic.com/assets/img/posts/computer-vision/distance-measurement/pinhole-camera.gif, December 10, 2018.
Published
How to Cite
Issue
Section
License
Submission of a manuscript implies: that the work described has not been published before that it is not under consideration for publication elsewhere; that if and when the manuscript is accepted for publication. Authors can retain copyright of their article with no restrictions. Also, author can post the final, peer-reviewed manuscript version (postprint) to any repository or website.

Since Oct. 01, 2015, PETI will publish new articles with Creative Commons Attribution Non-Commercial License, under The Creative Commons Attribution Non-Commercial 4.0 International (CC BY-NC 4.0) License.
The Creative Commons Attribution Non-Commercial (CC-BY-NC) License permits use, distribution and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes







{kind=link}
{kind=link}