
On the Estimation of the Mission Performance Index of Unmanned Surface Vehicles Based on the Mission Coverage Area
DOI:
https://doi.org/10.46604/aiti.2023.10548Keywords:
unmanned surface vehicle (USV), mission coverage area, mission performance index (MPI), illegal ship control, USV simulationAbstract
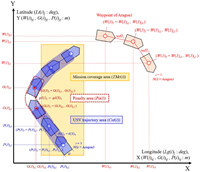
For mission planning and replanning of multiple unmanned surface vehicles (USVs), it is important to estimate each USV’s mission performance in terms of sea surveillance (e.g., illegal ship control). In this study, a mission performance index (MPI) is proposed based on the mission coverage area for estimating the USVs’ mission performance of illegal ship control. The penalty value is considered in the MPI calculation procedure owing to the track-off of the USV. In addition, the USV simulation is conducted under illegal ship control, and the MPI is calculated based on changing the mission coverage area. The results show that the MPI increases with the path width of the mission coverage area.
References
V. Bertram, “Unmanned Surface Vehicles—A Survey,” Skibsteknisk Selskab, vol. 1, pp. 1-14, January 2008.
J. E. Manley, “Unmanned Surface Vehicles, 15 Years of Development,” Oceans, pp. 1-4, September 2008.
D. W. Jung, et al., “A Study on Unmanned Surface Vehicle Combined with Remotely Operated Vehicle System,” Proceedings of Engineering and Technology Innovation, vol. 9, pp. 17-24, July 2018.
J. Ansary, et al., “Swarms of Aquatic Unmanned Surface Vehicles (USV), a Review from Simulation to Field Implementation,” Proceedings of International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, vol. 83914, pp. 436-528, August 2020.
N. S. Son, et al., “On the Sea Trial Test for the Validation of an Autonomous Collision Avoidance System of Unmanned Surface Vehicle, ARAGON,” Proceedings of the OCEANS 2018 MTS/IEEE Charleston, pp. 1-5, October 2018.
C. J. Chae, et al., “A Study on Identification of Development Status of MASS Technologies and Directions of Improvement,” Applied Sciences, vol. 10, no. 13, Article no. 4564, July 2020.
B. S. Hwang, et al., “The Fourth Industrial Revolution and Future Innovation: Policy Fields,” Proceedings of the Korea Technology Innovation Society Conference, pp. 436-528, August 2017.
R. Murphy, et al., “An Analysis of International Use of Robots for COVID-19,” Robotics and Autonomous Systems, vol. 148, Article no. 103922, February 2021.
S. Y. Kim, “Research Trends of USV,” Journal of the Society of Naval Architects of Korea, vol. 51, no. 2, p. 2, June 2014.
S. Y. Kim, et al., “Project: Development of Multi-Purpose Intelligent Unmanned Surface Vehicle,” Korea Institute of Ocean Science and Technology, Final Report PJT20040, August 15, 2019.
N. S. Son, “Project: Development of Situation Awareness and Navigation Technology of Unmanned Surface Vehicle Based on the Artificial Intelligence,” Korea Research Institute of Ships and Ocean Engineering, Report PES3880, January 2022.
N. S. Son, et al., “Study on a Waypoint Tracking Algorithm for Unmanned Surface Vehicle (USV),” Journal of Navigation and Port Research, vol. 33, no. 1, pp. 35-41, March 2009.
K. H. Yun, et al., “A Study on the Algorithm of Target Tracking System for USV Based on Simulation Method,” Journal of Ships and Ocean Engineering, vol. 56, pp. 19-25, December 2015.
M. A. bin Mansor, et al., “Motion Control Algorithm for Path Following and Trajectory Tracking for Unmanned Surface Vehicle: A Review Paper,” Proceedings of the 3rd International Conference on Control, Robotics, and Cybernetics, pp. 73-77, September 2018.
T. Liu, et al., “Path Following Control of the Underactuated USV Based on the Improved Line-of-Sight Guidance Algorithm,” Journal of Polish Maritime Research, vol. 24, no. 1, pp. 3-11, April 2017.
Y. Zhao, et al., “Path Following Optimization for an Underactuated USV Using Smoothly-Convergent Deep Reinforcement Learning,” IEEE Transactions on Intelligent Transportation Systems, vol. 22, no. 10, pp. 6208-6220, October 2021.
J. H. Woo, et al., “Deep Reinforcement Learning-Based Controller for Path Following of an Unmanned Surface Vehicle,” Ocean Engineering, vol. 183, pp. 155-166, July 2019.
M. Breivik, et al., “Straight-Line Target Tracking for Unmanned Surface Vehicles,” Modeling, Identification, and Control, vol. 29, no. 4, pp. 131-149, April 2008.
T. I. Fossen, Guidance and Control of Ocean Vehicles, New York: John Wiley and Sons, 1994.
Published
How to Cite
Issue
Section
License
Submission of a manuscript implies: that the work described has not been published before that it is not under consideration for publication elsewhere; that if and when the manuscript is accepted for publication. Authors can retain copyright in their articles with no restrictions. is accepted for publication. Authors can retain copyright of their article with no restrictions.

Since Jan. 01, 2019, AITI will publish new articles with Creative Commons Attribution Non-Commercial License, under The Creative Commons Attribution Non-Commercial 4.0 International (CC BY-NC 4.0) License.
The Creative Commons Attribution Non-Commercial (CC-BY-NC) License permits use, distribution and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes.






