
Driving Assistance System with Lane Change Detection
DOI:
https://doi.org/10.46604/aiti.2021.7109Keywords:
computer vision, embedded system, lane-shift detection, driver assistance systemAbstract
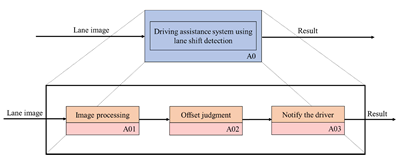
In this study, a simple technology for a self-driving system called “driver assistance system” is developed based on embedded image identification. The system consists of a camera, a Raspberry Pi board, and OpenCV. The camera is used to capture lane images, and the image noise is overcome through color space conversion, grayscale, Otsu thresholding, binarization, erosion, and dilation. Subsequently, two horizontal lines parallel to the X-axis with a fixed range and interval are used to detect left and right lane lines. The intersection points between the left and right lane lines and the two horizontal lines can be obtained, and can be used to calculate the slopes of the left and right lanes. Finally, the slope change of the left and right lanes and the offset of the lane intersection are determined to detect the deviation. When the angle of lanes changes drastically, the driver receives a deviation warning. The results of this study suggest that the proposed algorithm is 1.96 times faster than the conventional algorithm.
References
F. Bonin-Font, A. Burguera, A. Ortiz, and G. Oliver, “Concurrent Visual Navigation and Localization Using Inverse Perspective Transformation,” IET Electronics Letters, vol. 48, no. 5, pp. 264-266, March 2012.
L. Zhang and K. Yang, “Region-of-Interest Extraction Based on Frequency Domain Analysis and Salient Region Detection for Remote Sensing Image,” IEEE Geoscience and Remote Sensing Letters, vol. 11, no. 5, pp. 916-920, May 2014.
J. S. Sheu, C. H. Chang, T. L. Huang, and H. J. Lin, “Lane Departure Warning System Using Front-View and Two Mirror-View Cameras,” Scientia Iranica, vol. 22, no. 6, pp. 2126-2133, January 2015.
D. C. Andrade, F. Bueno, F. R. Franco, R. A. Silva, J. H. Z. Neme, E. Margraf, et al., “A Novel Strategy for Road Lane Detection and Tracking Based on a Vehicle’s Forward Monocular Camera,” IEEE Transactions on Intelligent Transportation Systems, vol. 20, no. 4, pp. 1497-1507, April 2019.
S. Jung, J. Youn, and S. Sull, “Efficient Lane Detection Based on Spatiotemporal Images,” IEEE Transactions on Intelligent Transportation Systems, vol. 17, no. 1, pp. 289-295, August 2015.
H. Wang, Y. Wang, X. Zhao, G. Wang, H. Huang, and J. Zhang, “Lane Detection of Curving Road for Structural Highway with Straight-Curve Model on Vision,” IEEE Transactions on Vehicular Technology, vol. 68, no. 6, pp. 5321-5330, June 2019.
C. Lee and J. H. Moon, “Robust Lane Detection and Tracking for Real-Time Applications,” IEEE Transactions on Intelligent Transportation Systems, vol. 19, no. 12, pp. 4043-4048, February 2018.
S. M. Borodkin, A. M. Borodkin, and I. B. Muchnik, “Optimal Requantization of Deep Grayscale Images and Lloyd–Max Quantization,” IEEE Transactions on Image Processing, vol. 15, no. 2, pp. 445-448, February 2006.
J. Lee, H. Tang, and J. Park, “Energy Efficient Canny Edge Detector for Advanced Mobile Vision Applications,” IEEE Transactions on Circuits and Systems for Video Technology, vol. 28, no. 4, pp. 1037-1046, December 2016.
R. K. Satzoda, S. Sathyanarayana, T. Srikanthan, and S. Sathyanarayana, “Hierarchical Additive Hough Transform for Lane Detection,” IEEE Embedded Systems Letters, vol. 2, no. 2, pp. 23-26, July 2010.
A. Gupta and A. Choudhary, “A Framework for Camera-Based Real-Time Lane and Road Surface Marking Detection and Recognition,” IEEE Transactions on Intelligent Vehicles, vol. 3, no. 4, pp. 476-485, December 2018.
S. Lee, Y. Kwak, Y. J. Kim, S. Park, and J. Kim, “Contrast-Preserved Chroma Enhancement Technique Using YCbCr Color Space,” IEEE Transactions on Consumer Electronics, vol. 58, no. 2, pp. 641-645, May 2012.
C. C. Lee and W. L. Hwang, “Mixture of Gaussian Blur Kernel Representation for Blind Image Restoration,” IEEE Transactions on Computational Imaging, vol. 3, no. 4, pp. 783-797, December 2017.
S. Jiang, T. Xu, J. Li, B. Huang, J. Guo, and Z. Bian, “IdentifyNet for Non-Maximum Suppression,” IEEE Access, vol. 7, pp. 148245-148253, September 2019.
N. Kanopoulos, N. Vasanthavada, and R. L. Baker, “Design of an Image Edge Detection Filter Using the Sobel Operator,” IEEE Journal of Solid-State Circuits, vol. 23, no. 2, pp. 358-367, April 1998.
J. S. Sheu and C. Y. Han, “Combining Cloud Computing and Artificial Intelligence Scene Recognition in Real-Time Environment Image Planning Walkable Area,” Advances in Technology Innovation, vol. 5, no. 1, pp. 10-17, January 2020.
Q. Chen, L. Zhao, J. Lu, G. Kuang, N. Wang, and Y. Jiang, “Modified Two-Dimensional Otsu Image Segmentation Algorithm and Fast Realization,” IET Image Processing, vol. 6, no. 4, pp. 426-433, June 2012.
J. Y. Gil and R. Kimmel, “Efficient Dilation, Erosion, Opening, and Closing Algorithms,” IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 24, no. 12, pp. 1606-1617, December 2002.
D. Nadadur and R. M. Haralick, “Recursive Binary Dilation and Erosion Using Digital Line Structuring Elements in Arbitrary Orientations,” IEEE Transactions on Image Processing, vol. 9, no. 5, pp. 749-759, February 2000.
M. Hua, M. K. Lau, J. Pei, and K. Wu, “Continuous K-Means Monitoring with Low Reporting Cost in Sensor Networks,” IEEE Transactions on Knowledge and Data Engineering, vol. 21, no. 12, pp. 1679-1691, December 2009.
S. Fernandes, D. Duseja, and R. Muthalagu, “Application of Image Processing Techniques for Autonomous Cars,” Proceedings of Engineering and Technology Innovation, vol.17, pp. 1-12, January 2021.
J. S. Sheu and W. H. Tsai, “Implementation of a Following Wheel Robot Featuring Stereoscopic Vision,” Multimedia Tools and Applications, vol. 76, pp 25161-25177, January 2017.
J. H. Yoo, S. W. Lee, S. K. Park, and D. H. Kim, “A Robust Lane Detection Method Based on Vanishing Point Estimation Using the Relevance of Line Segments,” IEEE Transactions on Intelligent Transportation Systems, vol. 18, no. 12, pp. 3254-3266, December 2017.
Published
How to Cite
Issue
Section
License
Submission of a manuscript implies: that the work described has not been published before that it is not under consideration for publication elsewhere; that if and when the manuscript is accepted for publication. Authors can retain copyright in their articles with no restrictions. is accepted for publication. Authors can retain copyright of their article with no restrictions.

Since Jan. 01, 2019, AITI will publish new articles with Creative Commons Attribution Non-Commercial License, under The Creative Commons Attribution Non-Commercial 4.0 International (CC BY-NC 4.0) License.
The Creative Commons Attribution Non-Commercial (CC-BY-NC) License permits use, distribution and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes.






