
Locomotion Control of a Bipedal Wheeled Robot Using Virtual Model Control and Linear Quadratic Regulator Techniques
DOI:
https://doi.org/10.46604/emsi.2024.13923Keywords:
bipedal wheeled robot, wheeled inverted pendulum model, linear quadratic regulator (LQR), proportional integral derivative, virtual model control (VMC)Abstract
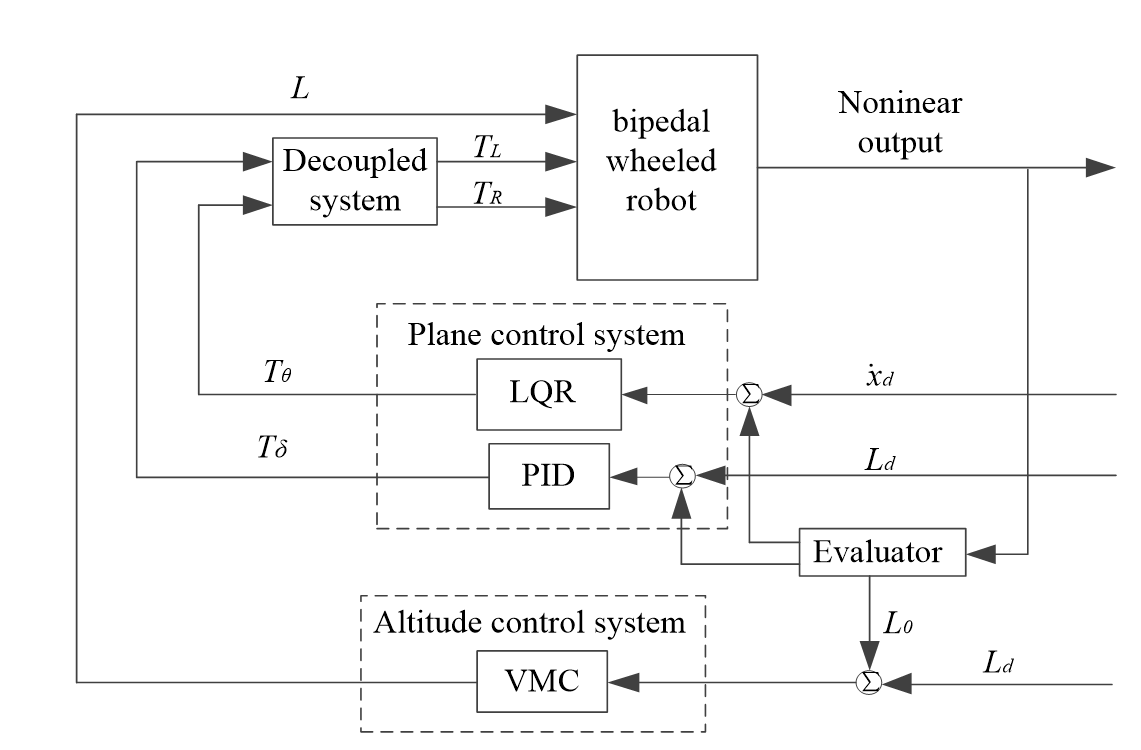
This paper aims to develop a balance control technique and investigates its impact on the stability and disturbance rejection capability of a bipedal wheeled robot. The bipedal wheeled robot is equivalent to a wheeled inverted pendulum nonlinear model with a legs-airframe centroid variable rod. The nonlinear model is linearized and decoupled into two subsystems: straight-line control using linear-quadratic regulator (LQR) for balance and speed, and steering control employing proportional integral derivative (PID). Height control adjusts the virtual force with PID-Feedforward, while hip torque is determined by virtual model control (VMC). MATLAB simulation confirms effective control of height, linear motion, and steering, with decoupling enhancing steering performance.
References
M. H. Korayem, M. Safarbali, and N. Y. Lademakhi, “Adaptive Robust Control with Slipping Parameters Estimation Based on Intelligent Learning for Wheeled Mobile Robot,” ISA transactions, vol. 147, pp. 577-589, 2024.
J. A. Rodríguez-Arellano, R. Miranda-Colorado, L. T. Aguilar, and M. A. Negrete-Villanueva, “Trajectory Tracking Nonlinear H∞ Controller for Wheeled Mobile Robots with Disturbances Observer,” ISA transactions, vol. 142, pp. 372-385, 2023.
Y. H. Pham, T. L. Nguyen, T. T. Bui, and T. V. Nguyen, “Adaptive Active Fault Tolerant Control for a Wheeled Mobile Robot under Actuator Fault and Dead Zone,” IFAC-PapersOnLine, vol. 55, no. 37, pp. 314-319, 2022.
J. P. Kolhe, S. Soumya, and S. E. Talole, “Disturbance Estimation based Robust Center of Mass Tracking Control of Humanoid Robot,” IFAC-PapersOnLine, vol. 57, pp. 315-320, 2024.
P. Ferrari, L. Rossini, F. Ruscelli, A. Laurenzi, G. Oriolo, N. G. Tsagarakiset, et al., “Multi-Contact Planning and Control for Humanoid Robots: Design and Validation of a Complete Framework,” Robotics and Autonomous Systems, vol. 166, article no. 104448, 2023.
J. N. Nganga, H. Li, and P. M. Wensing, “Second-Order Differential Dynamic Programming for Whole-Body MPC of Legged Robots,” IFAC-PapersOnLine, vol. 56, no. 3, pp. 499-504, 2023.
J. Dong, R. Liu, B. Lu, X. Guo, and H. Liu, “LQR-Based Balance Control of Two-Wheeled Legged Robot,” 41st Chinese Control Conference, pp. 450-455, 2022.
L. Zhao, Z. Yu, X. Chen, G. Huang, W. Wang, L. Han, et al., “System Design and Balance Control of a Novel Electrically-Driven Wheel-Legged Humanoid Robot,” IEEE International Conference on Unmanned Systems, pp. 742-747, 2021.
J. Zhang, Z. Li, S. Wang, Y. Dai, R. Zhang, J. Lai, et al., “Adaptive Optimal Output Regulation for Wheel-Legged Robot Ollie: A Data-Driven Approach,” Frontiers in Neurorobotics, vol. 16, article no. 1102259, 2022.
X. Liu, Y. Sun, S. Wen, K. Cao, Q. Qi, X. Zhang, et al., “Development of Wheel-Legged Biped Robots: A Review,” Journal of Bionic Engineering, vol. 21, no. 2, pp. 607-634, 2024.
L. Cui, S. Wang, J. Zhang, D. Zhang, J. Lai, Y. Zheng, et al., “Learning-Based Balance Control of Wheel-Legged Robots,” IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 7667-7674, 2021.
S. Wang, L. Cui, J. Zhang, J. Lai, D. Zhang, K. Chen, et al., “Balance Control of a Novel Wheel-Legged Robot: Design and Experiments,” IEEE International Conference on Robotics and Automation, pp. 6782-6788, 2021.
C. F. Hsu, B. R. Chen, and Z. L. Lin, “Implementation and Control of a Wheeled Bipedal Robot Using a Fuzzy Logic Approach,” Actuators, vol. 11, no. 12, article no. 11120357, 2022.
H. Cao, B. Lu, H. Liu, R. Liu, and X. Guo, “Modeling and MPC-Based Balance Control for a Wheeled Bipedal Robot,” 41st Chinese Control Conference, pp. 420-425, 2022.
J. Zhang, S. Wang, H. Wang, J. Lai, Z. Bing, Y. Jiang, et al., “An Adaptive Approach to Whole-Body Balance Control of Wheel-Bipedal Robot Ollie,” IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 12835-12842, 2022.
A. Kanungo, C. Choubey, V. Gupta, P. Kumar, and N. Kumar, “Design of an Intelligent Wavelet-Based Fuzzy Adaptive PID Control for Brushless Motor,” Multimedia Tools and Applications, vol. 82, no. 21, pp.33203-33223, 2023.
A. Kanungo, M. Mittal, L. Dewan, V. Mittal, and V. Gupta, “Speed Control of DC Motor with MRPID Controller in the Presence of Noise,” Wireless Personal Communications,” vol. 124, pp. 893-907, 2022.
M. A. I. Filho, E. Puchta, M. S. R. Martins, T. A. Alves, Y. D. S. Tadano, F. C. Corrêa, et al., “Bio-Inspired Optimization Algorithms Applied to the GAPID Control of a Buck Converter,” Energies, vol. 15, no. 18, article no. 6788, 2022.
Y. Shao, J. Liu, J. Huang, L. Hu, L. Guo, and Y. Fang, “The Implementation of Fuzzy PSO-PID Adaptive Controller in Pitch Regulation for Wind Turbines Suppressing Multi-Factor Disturbances,” Frontiers in Energy Research, vol. 9, article no. 828281, 2022.
J. Yuan, H. Chen, T. Yong, X. Lai, and X. Chen, “Research on Two-Wheeled Balance Car Based on Improved LQR Controller,” IEEE 6th Advanced Information Technology, Electronic and Automation Control Conference, pp. 1474-1479, 2022.
L. Guo, S. A. A. Rizvi, and Z. Lin, “Optimal Control of a Two‐Wheeled Self‐Balancing Robot by Reinforcement Learning,” International Journal of Robust and Nonlinear Control, vol. 31, no. 6, pp. 1885-1904, 2021.
X. Feng, S. Liu, Q. Yuan, J. Xiao, and D. Zhao, “Research on Wheel-legged Robot Based on LQR and ADRC,” Scientific Reports, vol. 13, article no. 15122, 2023.
T. Guo, J. Liu, H. Liang, Y. Zhang, W. Chen, X. Xia, et al., “Design and Dynamic Analysis of Jumping Wheel-Legged Robot in Complex Terrain Environment,” Frontiers in Neurorobotics, vol. 16, article no. 1066714, 2022.
S. J. Chacko, and R. J. Abraham, “On LQR Controller Design for an Inverted Pendulum Stabilization,” International Journal of Dynamics and Control, vol. 11, no. 4, pp. 1584-1592, 2023.
Published
How to Cite
Issue
Section
License
Copyright (c) 2024 Dan-Dan Liu, Wei Wang

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
Copyright Notice
Submission of a manuscript implies: that the work described has not been published before that it is not under consideration for publication elsewhere; that if and when the manuscript is accepted for publication. Authors can retain copyright in their articles with no restrictions. Also, author can post the final, peer-reviewed manuscript version (postprint) to any repository or website.
Since Sep. 01, 2023, EMSI will publish new articles with Creative Commons Attribution Non-Commercial License, under Creative Commons Attribution Non-Commercial 4.0 International (CC BY-NC 4.0) License.
The Creative Commons Attribution Non-Commercial (CC-BY-NC) License permits use, distribution and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes.




