
On the Position Determination of Docking Station for AUVs Using Optical Sensor and Neural Network
DOI:
https://doi.org/10.46604/ijeti.2020.4158Keywords:
optical sensor, neural network, pinhole camera, navigationAbstract
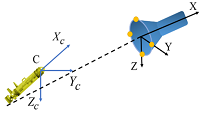
Detecting the relative position of the docking station is a very important issue for the homing of AUVs (Autonomous Unmanned Vehicles). To detect the position of the light source, a pinhole camera model structure was proposed like the camera model. However, due to the sensor resolution and the distortion errors of the pinhole camera system, the application of the camera of docking the under turbid sea environments is almost impossible.
In this paper, a new method detecting the position of the docking station using a light source is presented. Also, a newly developed optical sensor which makes it much easier to sense the light source than the camera system for homing of the AUV under the water is performed. In addition, to improve the system, a neural network (NN) algorithm constructing a model relating the light inputs and optical sensor which are developed in this study is proposed.
To evaluate the performance of the NN algorithm, the experiments were performed in the air beforehand. The result shows that the NN algorithm with AUV docking system using the NN model is better than the pinhole camera model.
References
M. T. Vu, H. S. Choi, J. I. Kang, D. H. Ji and H. Joong, “Energy efficient trajectory design for the underwater vehicle with bounded inputs using the global optimal sliding mode control,” Journal of Marine Science and Technology, vol. 25, no. 6, pp. 705-714, 2017.
M. T. Vu, H. S. Choi, T. Q. M. Nhat, and D. Q. Jung, “Designing optimal trajectories and tracking controller for unmanned underwater vehicles,” Recent Advances in Electrical Engineering and Related Sciences: Theory and Application, Lecture Notes in Electrical Engineering, vol. 465, pp. 658-668, 2018.
M. T. Vu, H. S. Choi, T. Q. M. Nhat, D. H. Ji and H. J. Son, “Study on the dynamic behaviors of an USV with a ROV,” OCEANS-Anchorage, IEEE Press, pp. 1-7, September 2017.
M. T. Vu, H. S. Choi, J. I. Kang, D. H. Ji and S. K. Jeong, “A study on hovering motion of the underwater vehicle with umbilical cable,” Ocean Engineering, vol. 135, pp. 137-157, 2017.
D. W. Jung, S. M. Hong, J. H. Lee, H. J. Cho, H. S. Choi and M. T, “A study on unmanned surface vehicle combined with remotely operated vehicle system,” Proceedings of Engineering and Technology Innovation, vol. 9, pp. 17-24, 2018.
K. S. Nam, D. G. Lee, J. D. Ryu and K. N. Ha, “The basic study of underwater robot control for over actuated systems,” Proceedings of Engineering and Technology Innovation, vol. 12, pp. 21-25, 2019.
A. Bahatmaka, D. J. Kim and D. Chrismianto, “Optimization of ducted propeller design for the ROV (remotely operated vehicle) using CFD,” Advances in Technology Innovation, vol. 2, no. 3, pp. 73-84, 2016.
N. Palomeras, G. Vallicrosa, A. Mallios, J. Bosch, E. Vidal, N. Hurtos, M. Carreras, and P. Ridao, “AUV homing and docking for remote operations,” Ocean Engineering, vol. 154, pp. 106-120, 2018.
T. Zhang, D. Li, and C. Yang, “Study on impact process of AUV underwater docking with a cone-shape dock,” Ocean Engineering, vol. 130, pp. 176-187, 2017.
A. S. Muntadas, E. Kelasidi, K. Y. Pettersen, and E. Brekke, “Learning an AUV docking maneuver with a convolutional neural network,” IFAC Journal of Systems and Control, vol. 8, 2019.
Y. Li, Y. Jiang, J. Cao, B. Wang, and Y. Li, “AUV docking experiments based on vision positioning using two cameras,” Ocean Engineering, vol. 110, pp. 163-173, 2015.
T. Palmer, D. Ribas, P. Ridaoy, and A. Malliosy, “Vision based localization system for AUV docking on subsea intervention panels,” OCEANS 2009-EUROPE, IEEE Press, pp. 1-10, October 2009.
J. Park, B. Jun, P. Lee, F. Lee, and J. Oh, “Experiment on underwater docking of an autonomous underwater vehicle ‘ISiMI’ using optical terminal guidance,” OCEANS 2007 - EUROPE, IEEE Press, pp. 1-6, September 2007.
A. B. Figueiredo, B. M. Ferreira, and A. C. Matos, “Vision-based localization and positioning of an AUV,” OCEANS 2016 - Shanghai, pp. 1-7, April 2016.
F. Eren, S. Pe’eri, M. W. Thein, Y. Rzhanov, B. Celikkol, and M. R. Swift, “Position, orientation and velocity detection of unmanned underwater vehicles (UUVs) using an optical detector array,” Sensors, vol.17, no. 8, pp. 17-41, 2017.
W. M. Newman and R. F. Sproull, Principles of Interactive Computer graphics, McGraw-Hill, New York, 1979.
Published
How to Cite
Issue
Section
License
Copyright Notice
Submission of a manuscript implies: that the work described has not been published before that it is not under consideration for publication elsewhere; that if and when the manuscript is accepted for publication. Authors can retain copyright in their articles with no restrictions. Also, author can post the final, peer-reviewed manuscript version (postprint) to any repository or website.

Since Jan. 01, 2019, IJETI will publish new articles with Creative Commons Attribution Non-Commercial License, under Creative Commons Attribution Non-Commercial 4.0 International (CC BY-NC 4.0) License.
The Creative Commons Attribution Non-Commercial (CC-BY-NC) License permits use, distribution and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes.





.jpg)


