
Optimization of Ducted Propeller Design for the ROV (Remotely Operated Vehicle) using CFD
Keywords:
Remotely Operated Vehicle (ROV), ducted propeller, CFD, genetic al-gorithmsAbstract
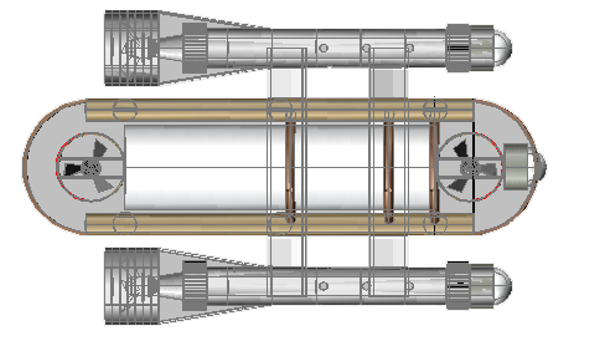
The development of underwater robot technology is growing rapidly. For reaching the best performance, it is important that the innovation on ROV should be focused on the thruster and propeller.
In this research, the ducted propeller thruster is used while three types of SHUSKHIN nozzle are selected. The design is compared in accordance with the thruster that has been made as the propulsion device of underwater robots. Each type of the thruster model indicates different force and torque. For the analysis, each model is built in Computer Aided Design (Rhinoceros) program packages and Computational Fluid Dynamics (CFD) to find the most optimal model which can produce the highest thrust. Among the entire model, the Kaplan series (Ka5-75) with the type C of nozzle has the highest thrust which is 2.53 N or 25.24% of extra thrust.
For the optimization of thrust, genetic Algorithms (GA) is used. The GA can search for parameters in large multi-dimensional design space. Thus, the principle can be applied for determining the initial propeller that produces optimum thrust of ROV. The GA has successfully shown able to obtain an optimal set parameters for propeller characteristics with the best performance.
Published
How to Cite
Issue
Section
License
Submission of a manuscript implies: that the work described has not been published before that it is not under consideration for publication elsewhere; that if and when the manuscript is accepted for publication. Authors can retain copyright in their articles with no restrictions. is accepted for publication. Authors can retain copyright of their article with no restrictions.

Since Jan. 01, 2019, AITI will publish new articles with Creative Commons Attribution Non-Commercial License, under The Creative Commons Attribution Non-Commercial 4.0 International (CC BY-NC 4.0) License.
The Creative Commons Attribution Non-Commercial (CC-BY-NC) License permits use, distribution and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes.


