
Observer-Based Quadratic Guaranteed Cost Control for Linear Uncertain Systems with Control Gain Variation
DOI:
https://doi.org/10.46604/aiti.2022.9252Keywords:
polytopic uncertainty, quadratic guaranteed cost control, observer-based controller, control gain variation, linear matrix inequality (LMI)Abstract
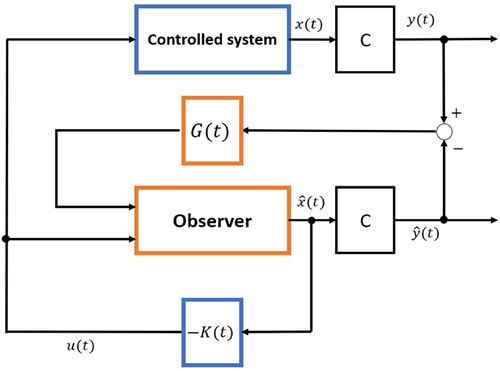
This study proposes a method for designing observer-based quadratic guaranteed cost controllers for linear uncertain systems with control gain variations. In the proposed approach, an observer is designed, and then a feedback controller that ensures the upper bound on the given quadratic cost function is derived. This study shows that sufficient conditions for the existence of the observer-based quadratic guaranteed cost controller are given in terms of linear matrix inequalities. A sub-optimal quadratic guaranteed cost control strategy is also discussed. Finally, the effectiveness of the proposed controller is illustrated by a numerical example. The result shows that the proposed controller is more effective than conventional methods even if system uncertainties and control gain variations exist.
References
H. Oya, et al., “Observer-Based Robust Control Giving Consideration to Transient Behavior for Linear Systems with Structured Uncertainties,” International Journal of Control, vol. 75, no. 15, pp. 1231-1240, October 2002.
H. Oya, et al., “Adaptive Robust Control Scheme for Linear Systems with Structure Uncertainties,” IEICE Transactions on Fundamentals of Electronics, Communications, and Computer Sciences, vol. E87-A, no. 8, pp. 2168-2173, August 2004.
H. Oya, et al., “Robust Control Giving Consideration to Time Response for a Linear Systems with Uncertainties,” Transactions of the Institute of Systems, Control, and Information Engineers, vol. 15, no. 8, pp. 404-412, August 2002.
S. S. Chang, et al., “Adaptive Guaranteed Cost Control of Systems with Uncertain Parameters,” IEEE Transactions on Automatic Control, vol. 17, no. 4, pp. 474-483, August 1972.
S. O. R. Moheimani, et al., “Optimal Quadratic Guaranteed Cost Control of a Class of Uncertain Time-Delay Systems,” IEE Proceedings—Control Theory and Applications, vol. 144, no. 2, pp. 183-188, March 1997.
I. R. Petersen, et al., “Optimal Guaranteed Cost Control and Filtering for Uncertain Linear Systems,” IEE Transactions on Automatic Control, vol. 39, no. 9, pp.1971-1977, September 1994.
L. Yu, et al., “An LMI Approach to Guaranteed Cost Control of Linear Uncertain Time Delay Systems,” Automatica, vol. 35, no. 6, pp. 1155-1159, June 1999.
S. H. Park, et al., “H∞ Control with Performance Bound for a Class of Uncertain Linear Systems,” Automatica, vol. 30, no. 12, pp. 2009-2012, April 1994.
R. Petersen, “A Riccati Equation Approach to the Design of Stabilizing Controllers and Observers for a Class of Uncertain Linear Systems,” IEEE Transactions on Automatic Control, vol. 30, no. 9, pp. 904-907, September 1985.
H. Oya, et al., “Observer-Based Guaranteed Cost Control for Polytopic Uncertain Systems,” The Japan Society of Mechanical Engineers, vol. 71, no. 710, pp. 89-98, October 2005.
S. Nagai, et al., “A Point Memory Observer with Adjustable Parameters for a Class of Uncertain Linear Systems with State Delay,” Proceedings of Engineering and Technology Innovation, vol. 11, pp. 38-45, January 2019.
L. H. Keel, et al., “Robust, Fragile, or Optimal?” IEEE Transactions on Automatic Control, vol. 42, no. 8, pp. 1098-1105, August 1997.
G. H. Yang, et al., “H∞ Control for Linear Systems with Additive Controller Gain Variations,” International Journal of Control, vol. 73, no. 16, pp. 1500-1506, February 2000.
D. Famularo, et al., “Robust Non-Fragile LQ Controllers: The Static State Feedback Case,” Proceedings of the 1998 American Control Conference, vol. 2, pp. 1109-1113, June 1998.
H. Oya, et al., “Guaranteed Cost Control for Uncertain Linear Continuous-Time Systems under Control Gain Perturbations,” The Japan Society of Mechanical Engineers, vol. 72, no. 713, pp. 72-101, January 2006.
K. Miyakoshi, et al., “Synthesis of Formation Control Systems for Multi-Agent Systems under Control Gain Perturbations,” Advances in Technology Innovation, vol. 5, no. 2, pp. 112-125, April 2020.
D. Rosinová, et al., “Output Feedback Stabilization of Linear Uncertain Discrete Systems with Guaranteed Cost,” 15th Triennial World Congress, vol. 35, no. 1, pp. 211-215, July 2002.
M. Noton, Modern Control Engineering, New York: Pergamon Press, 1972.
S. Nagai, et al., “Synthesis of Decentralized Variable Gain Robust Controllers with Guaranteed L2 Gain Performance for a Class of Uncertain Large-Scale Interconnected Systems,” Journal of Control Science and Engineering, vol. 2015, Article no. 342867, 2015.
Published
How to Cite
Issue
Section
License
Submission of a manuscript implies: that the work described has not been published before that it is not under consideration for publication elsewhere; that if and when the manuscript is accepted for publication. Authors can retain copyright in their articles with no restrictions. is accepted for publication. Authors can retain copyright of their article with no restrictions.

Since Jan. 01, 2019, AITI will publish new articles with Creative Commons Attribution Non-Commercial License, under The Creative Commons Attribution Non-Commercial 4.0 International (CC BY-NC 4.0) License.
The Creative Commons Attribution Non-Commercial (CC-BY-NC) License permits use, distribution and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes.






