
A Study on Verification of the Dynamic Modeling for a Submerged Body Based on Numerical Simulation
DOI:
https://doi.org/10.46604/ijeti.2020.4350Keywords:
5-DOF equations of motion, maneuvering simulation, maneuvering coefficients, stability analysis, sensitivity analysis, abnormal motionAbstract
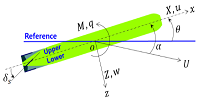
This study proposed a procedure to identify maneuvering coefficients that brought about abnormal motions in the simulation of a submerged body. The first step in responding to abnormal motions was conducting stability analysis to determine whether the submerged body could be simulated. If doing so was feasible, sensitivity analysis was then performed to determine maneuvering coefficients that caused the abnormal motion in the simulation. Finally, we analyzed the order of maneuvering coefficients identified by the sensitivity analysis. We also compared it with empirical formulas and other results obtained from model tests. The dynamics model targeting a high-speed submerged body was indirectly verified by the above procedure. In this study, the effectiveness of the dynamic model was verified, and parameters causing the abnormal motion were identified in accordance with the developed procedure.
References
Y. K. Kim, K. H. Yun, S. Y. Kim, and D. J. Kim, “Captive model test of submerged body using CPMC,” Journal of the Society of Naval Architects of Korea, vol. 49, no. 4, pp. 296-303, Aug. 2012.
K. Y. Lee, “An analysis of required technologies for developing unmanned mine countermeasure system based on the unmanned underwater vehicle,” Journal of the Korea Institute of Military Science and Technology, vol. 14, no. 4, pp. 579-589, Aug. 2011.
J. Y. Park, N. Kim, K. P. Rhee, H. K. Yoon, C. Kim, C. Jung, K. Ahn, and S. Lee, “Study on coning motion test for submerged body,” Journal of Ocean Engineering and Technology, vol. 29, no. 6, pp. 436-444, 2015.
M. Jeon, H. K. Yoon, J. Hwang, and H. J. Cho, “Study on maneuvering characteristics of submerged body by changing its design parameters,” Journal of Ocean Engineering and Technology, vol. 31, no. 2, pp. 155-163, 2017.
Howaldtswerke-Deutsche Werft, “KSS-Ⅱ course 14 manoeuvrability of submarine,” Howaldtswerke-Deutsche Werft AG Report, Oct 15, 2001.
E. A. Barros, A. Pascoal, and E. Sa, “AUV dynamics: modelling and parameter estimation using analytical, semi-empirical, and CFD method”, vol. 37, no. 10, pp. 369-376, Jul. 2004.
T. T. Nguyen, H. K. Yoon, Y. Park, and C. Park, “Estimation of hydrodynamic derivatives of full-scale submarine using RANS solver,” Journal of Ocean Engineering and Technology, vol. 32, no. 5, pp. 386-392, Oct. 2018.
T. Gao, Y. Wang, Y. Pang, and J. Cao, “Hull shape optimization for autonomous underwater vehicles using CFD,” Engineering Application of Computational Fluid Mechanics, vol. 10, no. 1, pp.599-607, Sep. 2016.
Y. J. Sung and S. H. Park, “Prediction of Ship manoeuvring performance based on virtual captive model tests,” Journal of the Society of Naval Architects of Korea, vol. 52, no. 5, pp. 407-417, Oct. 2015.
H. Kim and H. Cho, “Numerical study on control derivatives of a high-speed underwater vehicle,” Journal of Mechanical Science and Technology, vol. 25, no. 3, pp. 759, May. 2011.
M. Z. Ernania, M. Bozorg, and S. Ebrahimi, “Identification of an autonomous underwater vehicle dynamic using extended kalman filter with ARMA noise model,” International Journal of Robotics, vol. 4, no. 1, pp. 22-28, 2015.
F. Azarsina, N. Bose, and M. S. Self, “An underwater vehicle maneuvering simulation; focus on turning maneuvers,” The Journal of Ocean Technology, vol. 2, no. 1, pp. 54-73, 2007.
M. Jeon, H. K. Yoon, J. Hwang, and H. J. Cho, “Analysis of the dynamic characteristics for the change of design parameters of an underwater vehicle using sensitivity analysis,” International Journal of Naval Architecture and Ocean Engineering, vol. 10, no. 4, pp. 508-519, Jul. 2018.
A. J. Healey and D. Lienard, “Multivariable sliding-mode control for autonomous diving and steering of unmanned underwater vehicles,” IEEE Journal of Oceanic Engineering, vol. 18, no. 3, pp. 327-339, Jul. 1993.
T. Prestero, “Development of a six-degree of freedom simulation model for the REMUS autonomous underwater vehicle,” Proc. MTS/IEEE Oceans 2001, An Ocean Odyssey. Conference Proceedings(IEEE Cat. No. 01CH37295), Honolulu, HI, Nov. 2001, pp. 450-455.
L. Lapierre and B. Jouvencel, “Robust nonlinear path-following control of an AUV,” IEEE Journal of Oceanic Engineering, vol. 33, no. 2, pp. 89-102, Oct. 2008.
J. Evans and M. Nahon, “Dynamics modeling and performance evaluation of an autonomous underwater vehicle,” Ocean Engineering, vol. 31, no. 14-15, pp. 1835-1858, Oct. 2004.
R. Yang, “Modeling and robust control approach for autonomous underwater vehicles,” Ph.D. dissertation, Dept. Ocean Eng., Ocean Univ. of Chani., Cambridge, 2016.
V.B.S. Ayyangar, P. Krishnankutty, M. Korulla, and P.K. Panigrahi, “Stability analysis of a positively buoyant underwater vehicle in vertical plane for a level flight at varying buoyancy, BG and speeds,” Ocean Engineering, vol. 148, no. 15, pp. 331-348, Jan. 2018.
D. J. Yeo, H. K. Yoon, Y. G. Kim, C. M. Lee, “Sensitivity analysis on the stability of a submarine concerning its design parameters,” Journal of the Society of Naval Architects of Korea, vol. 43, no. 4, pp. 521-528, 2006.
D. J. Yeo and K. P. Rhee, “A study on the sensitivity analysis of submersibles' manoeuvrability,” Journal of the Society of Naval Architects of Korea, vol. 42, no. 5, pp. 458-465, 2005.
D. J. Yeo and K. P. Rhee, “Design of sensitivity-maximizing input for submersibles' manoeuvring coefficients using genetic algorithm technique,” Journal of the Society of Naval Architects of Korea, vol. 43, no. 2, pp. 156-163, 2006.
D. Sen, “A study on sensitivity analysis of maneuverability performance on the hydrodynamic coefficients for submerged bodies,” Journal of Ship Research, vol. 44, no. 3, pp. 186-196, Nov. 2000.
S. Thuné, “Simulation of Submarine Manoeuvring,” Ms. Dissertation, Royal Institute of Technology, Sweden, 2015.
Published
How to Cite
Issue
Section
License
Copyright Notice
Submission of a manuscript implies: that the work described has not been published before that it is not under consideration for publication elsewhere; that if and when the manuscript is accepted for publication. Authors can retain copyright in their articles with no restrictions. Also, author can post the final, peer-reviewed manuscript version (postprint) to any repository or website.

Since Jan. 01, 2019, IJETI will publish new articles with Creative Commons Attribution Non-Commercial License, under Creative Commons Attribution Non-Commercial 4.0 International (CC BY-NC 4.0) License.
The Creative Commons Attribution Non-Commercial (CC-BY-NC) License permits use, distribution and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes.





.jpg)


