
Enhanced Kalman Filter Navigation Algorithm Based on Correntropy and Fixed-Point Update
DOI:
https://doi.org/10.46604/ijeti.2022.8072Keywords:
correntropy criterion (CC), correntropy Kalman filter (CKF), fixed-point algorithm, global positioning system (GPS), minimum mean square error (MMSE)Abstract
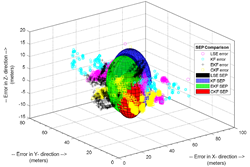
The accuracy of position estimation plays a key role in many of the precise positioning applications such as category I (CAT-I) aircraft landings, survey work, etc. To improve the accuracy of position estimation, a novel kinematic positioning algorithm designated as correntropy Kalman filter (CKF) is proposed in this study. Instead of minimum mean square error (MMSE), correntropy criterion (CC) is used as the optimality criterion of CKF. The prior estimates of the state and covariance matrix are computed in CKF and a novel fixed-point algorithm is then used to update the posterior estimates. The data of a dual-frequency global positioning system (GPS) receiver located at Indian Institute of Science (IISc), Bangalore (13.021°N/77.5°E) is collected from Scripps Orbit and Permanent Array Centre (SOPAC) to implement the proposed algorithm. The results of the proposed CKF algorithm are promising and exhibit significant improvement in position estimation compared to the conventional methods.
References
D. H. Ji, H. S. Choi, S. K. Jeong, J. Y. Oh, S. K. Kim, and S. S. You, “A Study on Heading and Attitude Estimation of Underwater Track Vehicle,” Advances in Technology Innovation, vol. 4, no. 2, pp. 84-93, April 2019.
M. Allahyari, M. J. Olsen, D. T. Gillins, and M. L. Dennis, “Evaluation of the Horizontal and Vertical Accuracy of GNSS Survey Observations from a Real-Time Network,” AGU Fall Meeting Abstracts, vol. 2016, pp. G21B-1003, December 2016.
International Civil Aviation Organization, “Manual on Required Navigation Performance (RNP),” Montreal: International Civil Aviation Organization, 1999.
H. Xiong, J. Tang, H. Xu, W. Zhang, and Z. Du, “A Robust Single GPS Navigation and Positioning Algorithm Based on Strong Tracking Filtering,” IEEE Sensors Journal, vol. 18, no. 1, pp. 290-298, January 2018.
X. Wang and M. Liang, “GPS Positioning Method Based on Kalman Filtering,” International Conference on Robots and Intelligent System, May 2018, pp. 77-80.
G. L. Jia, N. Li, M. M. Bai, and Y. G. Zhang, “A Novel Student’s t-based Kalman Filter with Colored Measurement Noise,” Circuits, Systems, and Signal Processing, vol. 39, no. 8, pp. 4225-4242, August 2020.
Y. Huang and Y. Zhang, “A New Process Uncertainty Robust Student’s t Based Kalman Filter for SINS/GPS Integration,” IEEE Access, vol. 5, pp. 14391-14404, 2017.
A. Santra, S. Mahato, S. Dan, and A. Bose, “Precision of Satellite Based Navigation Position Solution: A Review Using NavIC Data,” Journal of Information and Optimization Sciences, vol. 40, no. 8, pp. 1683-1691, 2019.
C. Rajasekhar, V. B. S. S. I. Dutt, and G. S. Rao, “Weighted GDoP for Improved Position Accuracy Using NavIC and GPS Hybrid Constellation over Indian Sub-Continent,” International Journal of Intelligent Networks, vol. 2, pp. 42-45, 2021.
H. Hatano, T. Kitani, M. Fujii, Y. Watanabe, and H. Onishi, “A Helpful Positioning Method with Two GNSS Satellites in Urban Area,” 3rd International Conference on Mobile Services, Resources, and Users, pp. 41-46, November 2013.
M. I. Ribeiro, “Kalman and Extended Kalman Filters: Concept, Derivation and Properties,” Institute for Systems and Robotics, Technical Report, February 2004.
M. Eliasson, “A Kalman Filter Approach to Reduce Position Error for Pedestrian Applications in Areas of Bad GPS Reception,” Degree Project, Bachelor’s Programme in Computing Science, UMEA University, 2014.
C. Luo, S. I. McClean, G. Parr, L. Teacy, and R. De Nardi, “UAV Position Estimation and Collision Avoidance Using the Extended Kalman Filter,” IEEE Transactions on Vehicular Technology, vol. 62, no. 6, pp. 2749-2762, July 2013.
S. Shokri, N. Rahemi, and M. R. Mosavi, “Improving GPS Positioning Accuracy Using Weighted Kalman Filter and Variance Estimation Methods,” CEAS Aeronautical Journal, vol. 11, no. 2, pp. 515-527, June 2020.
Y. Hao, A. Xu, X. Sui, and Y. Wang, “A Modified Extended Kalman Filter for a Two-Antenna GPS/INS Vehicular Navigation System,” Sensors, vol. 18, no. 11, 3809, November 2018.
D. J. Jwo and T. S. Cho, “Critical Remarks on the Linearised and Extended Kalman Filters with Geodetic Navigation Examples,” Measurement, vol. 43, no. 9, pp. 1077-1089, November 2010.
Q. Ge, T. Shao, S. Chen, and C. Wen, “Carrier Tracking Estimation Analysis by Using the Extended Strong Tracking Filtering,” IEEE Transactions on Industrial Electronics, vol. 64, no. 2, pp. 1415-1424, February 2017.
Y. Zhang, C. Shen, J. Tang, and J. Liu, “Hybrid Algorithm Based on MDF-CKF and RF for GPS/INS System during GPS Outages,” IEEE Access, vol. 6, pp. 35343-35354, April 2018.
Y. Zhang, J. Wang, Q. Sun, and W. Gao, “Adaptive Cubature Kalman Filter Based on the Variance-Covariance Components Estimation,” The Journal of Global Positioning Systems, vol. 15, no. 1, pp. 1-9, December 2017.
X. Liu, B. Chen, H. Zhao, J. Qin, and J. Cao, “Maximum Correntropy Kalman Filter with State Constraints,” IEEE Access, vol. 5, pp. 25846-25853, 2017.
W. Liu, P. P. Pokharel, and J. C. Principe, “Correntropy: Properties and Applications in Non-Gaussian Signal Processing,” IEEE Transactions on Signal Processing, vol. 55, no. 11, pp. 5286-5298, November 2007.
W. Liu, P. P. Pokharel, and J. C. Principe, “Correntropy: A Localized Similarity Measure,” IEEE International Joint Conference on Neural Network Proceedings, pp. 4919-4924, July 2006.
B. Chen, L. Xing, J. Liang, N. Zheng, and J. C. Principe, “Steady-State Mean-Square Error Analysis for Adaptive Filtering under the Maximum Correntropy Criterion,” IEEE Signal Processing Letters, vol. 21, no.7, pp. 880-884, July 2014.
J. C. Principe, D. Xu, Q. Zhao, and J. W. Fisher, “Learning from Examples with Information Theoretic Criteria,” Journal of VLSI Signal Processing Systems for Signal, Image, and Video Technology, vol. 26, no. 1, pp. 61-77, August 2000.
M. S. Grewal and A. P. Andrews, “Kalman Filtering: Theory and Practice Using MATLAB”, 4th ed., New York: Wiley, 2015.
P. S. Kumar and V. B. S. S. I. Dutt, “Navigation Solutions for GPS Receiver Position Estimation over the Southern Region of India,” International Journal of Recent Technology and Engineering, vol. 7, no. 6, pp. 1672-1675, March 2019.
X. Liu, H. Qu, J. Zhao, and B. Chen, “Extended Kalman Filter under Maximum Correntropy Criterion,” International Joint Conference on Neural Networks, pp. 1733-1737, July 2016.
P. S. Kumar, V. B. S. S. I. Dutt, and G. Laveti, “A Novel Kinematic Positioning Algorithm for GPS Applications in Urban Canyons,” Materials Today: Proceedings, vol. 33, pp. 3359-3365, 2020.
B. Chen, X. Liu, H. Zhao, and J. C. Principe, “Maximum Correntropy Kalman Filter,” Automatica, vol. 76, pp. 70-77, February 2017.
N. A. Kumar, C. Suresh, and G. S. Rao, “Extended Kalman Filter for GPS Receiver Position Estimation,” International Conference on Frontiers of Intelligent Computing: Theory and Applications, pp. 481-488, November 2018.
NovAtel, “Statistics and Its Relationship to Accuracy Measure in GPS,” https://www.mat.uc.pt/~gil/downloads/GPSMedidasExactidao.pdf, December 03, 2003.
F. van Diggelen, “GNSS Accuracy: Lies, Damn Lies, and Statistics,” GPS World, vol. 18, no. 1, pp. 26-32, January 2007.
L. Bagadi, G. S. Rao, and N. A. Kumar, “Firefly, Teaching Learning Based Optimization and Kalman Filter Methods for GPS Receiver Position Estimation,” Procedia Computer Science, vol. 143, pp. 892-898, 2018.
Published
How to Cite
Issue
Section
License
Copyright Notice
Submission of a manuscript implies: that the work described has not been published before that it is not under consideration for publication elsewhere; that if and when the manuscript is accepted for publication. Authors can retain copyright in their articles with no restrictions. Also, author can post the final, peer-reviewed manuscript version (postprint) to any repository or website.

Since Jan. 01, 2019, IJETI will publish new articles with Creative Commons Attribution Non-Commercial License, under Creative Commons Attribution Non-Commercial 4.0 International (CC BY-NC 4.0) License.
The Creative Commons Attribution Non-Commercial (CC-BY-NC) License permits use, distribution and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes.





.jpg)


