
Position Control and Novel Application of SCARA Robot with Vision System
Keywords:
SCARA, pick-and-place, forward and inverse kinematics, vision systemAbstract
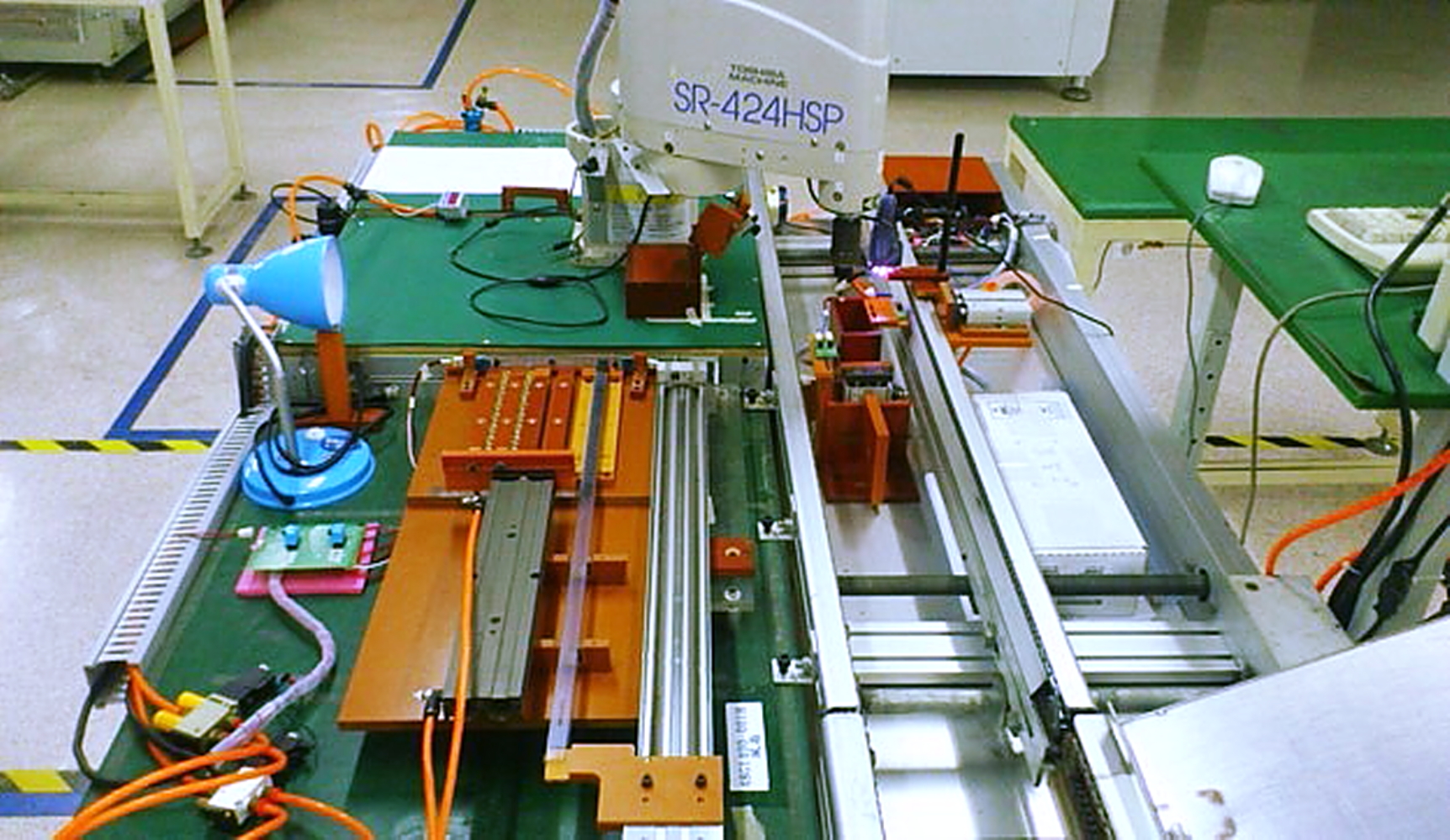
In this paper, a SCARA robot arm with vision system has been developed to improve the accuracy of pick-and-place the surface mount device (SMD) on PCB during surface mount process. Position of the SCARA robot can be controlled by using coordinate auto-compensation technique. Robotic movement and position control are auto-calculated based on forward and inverse kinematics with enhanced the intelligent image vision system. The determined x-y position and rotation angle can then be applied to the desired pick & place location for the SCARA robot. A series of experiments has been conducted to improve the accuracy of pick-and-place SMDs on PCB.References
SCARA, The ROBOT Hall of Fame, Power by Carnegie Mellon, http://www.robothalloffame.org/inductees/06inductees/scara.html
A. Burisch, J. Wrege, A. Raatz, J. Hesselbach, and R. Degen, “PARVUS – miniaturised robot for improved flexibility in micro production,” Assembly Automation, vol. 27, no. 1, 1980.
S. K. Dwivedy and P. Eberhard, “Dynamic analysis of flexible manipulators, a literature review,” Journal of Mechanism and Machine Theory, vol. 41, no. 7, pp. 749-777, 2006.
A. Visioli and G. Legnani, “On the trajectory tracking control of industrial SCARA robot manipulators,” IEEE Transactions on Industrial Electronics, vol. 49, no. 1, pp. 224-232, 2002.
G. S. Huang, C. K. Tung, H. C. Lin, and S. H. Hsiao, “Inverse kinematics analysis trajectory planning for a robot arm,” Proceedings of 8th Asian Control Conference (ASCC 2011), Kaohsiung, Taiwan, pp. 965-970, May 2011.
J. Fang and W. Li, “Four degrees of freedom SCARA robot kinematics modelling and simulation analysis,” International Journal of Computer, Consumer and Control, vol. 2, no. 4, pp. 20-27, 2013.
F. Escobar, S. Díaz, C. Gutiérrez, Y. Ledeneva, C. Hernández, D. Rodríguez, and R. Lemus, “Simulation of control of a SCARA robot actuated by pneumatic artificial muscles using RNAPM,” Journal of Applied Research and Technology, vol. 12, no. 5, pp. 939-946, 2014.
S. H. Han, W. H. See, J. Lee, M. H. Lee, and H. Hashimoto, “Image-based visual servoingcontrol of a SCARA type dual-arm robot,” IEEE International Symposium on Industrial Electronics, Cholula, Puebla, Mexico, vol. 2, pp. 517-522, Dec. 2000.
H. Zhu, J. Xu, D. He, K. Xing, and Z. Chen, “Design and implementation of the moving workpiece sorting system based on LabVIEW,” 26th Chinese Control and Decision Conference (2014 CCDC), Changsha, China, pp. 5034-5038, May 2014.
R. Szabo and A. Gontean, “Robotic arm control with stereo vision made in LabWindows/CVI,” 38th International Conference on Telecommunications and Signal Processing (TSP), Prague, Czech, pp. 1-5, July 2015.
Published
How to Cite
Issue
Section
License
Submission of a manuscript implies: that the work described has not been published before that it is not under consideration for publication elsewhere; that if and when the manuscript is accepted for publication. Authors can retain copyright in their articles with no restrictions. is accepted for publication. Authors can retain copyright of their article with no restrictions.

Since Jan. 01, 2019, AITI will publish new articles with Creative Commons Attribution Non-Commercial License, under The Creative Commons Attribution Non-Commercial 4.0 International (CC BY-NC 4.0) License.
The Creative Commons Attribution Non-Commercial (CC-BY-NC) License permits use, distribution and reproduction in any medium, provided the original work is properly cited and is not used for commercial purposes.


